Fases del proyecto
Habilidades aprendidas
Conclusiones y trabajo a futuro
Robot de exploración en la Luna y Marte
Fase 1. Planteamiento
Las cuevas de la Luna y Marte.
La Agencia Espacial Europea sugiere la creación de colonias espaciales en las cuevas de estos cuerpos celestes.
Estudios de las cavidades en la Luna y Marte revelan que sus túneles de lava son de 100 a 1.000 veces mayores que los de la Tierra, debido a la menor gravedad. Esto los convierte en candidatos viables para futuras colonias espaciales.

Ahí es donde entramos en juego mi equipo y yo. A principio de curso se nos propuso crear un robot para explorar estas cuevas y ver si realmente sirven como colonias.
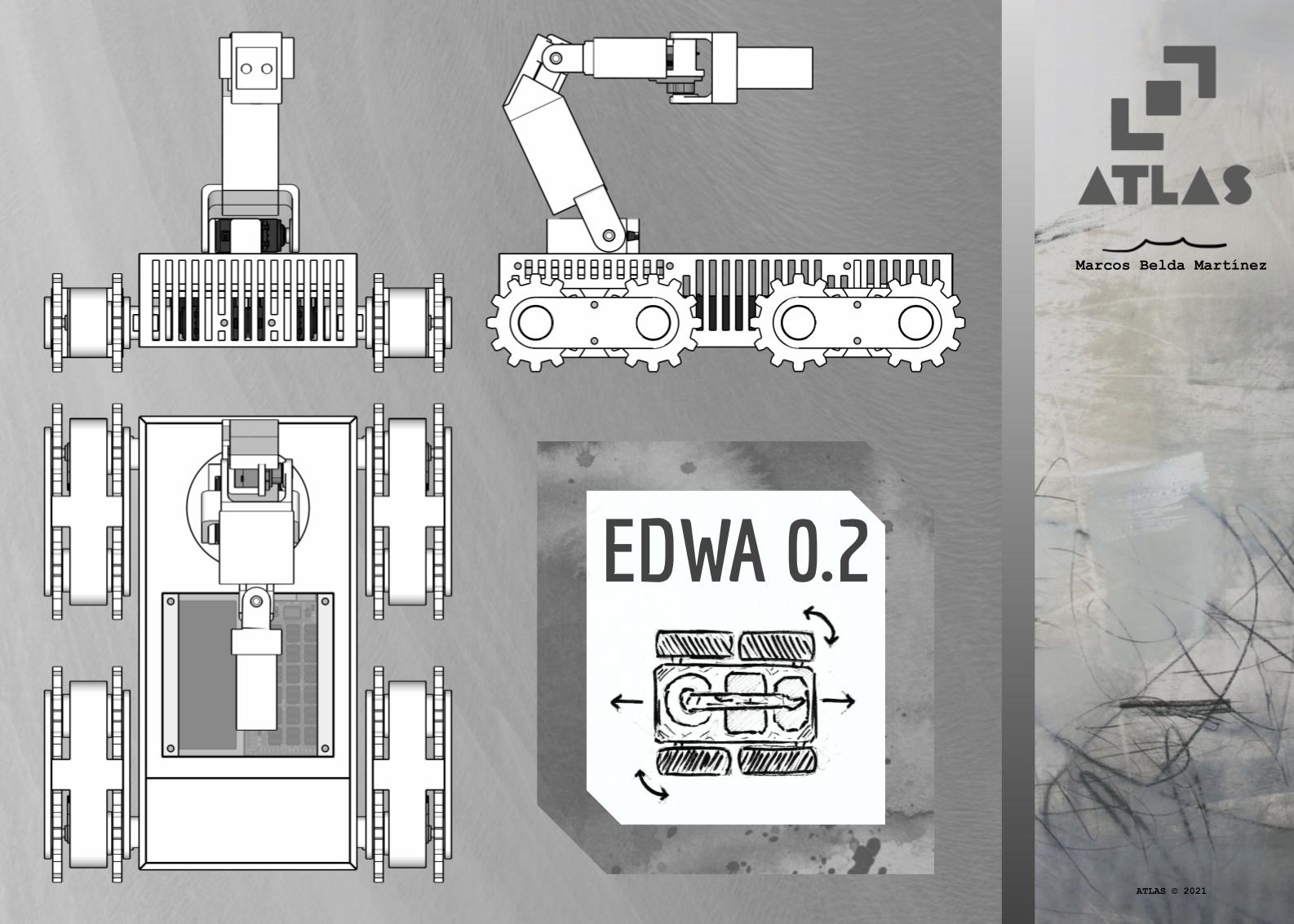
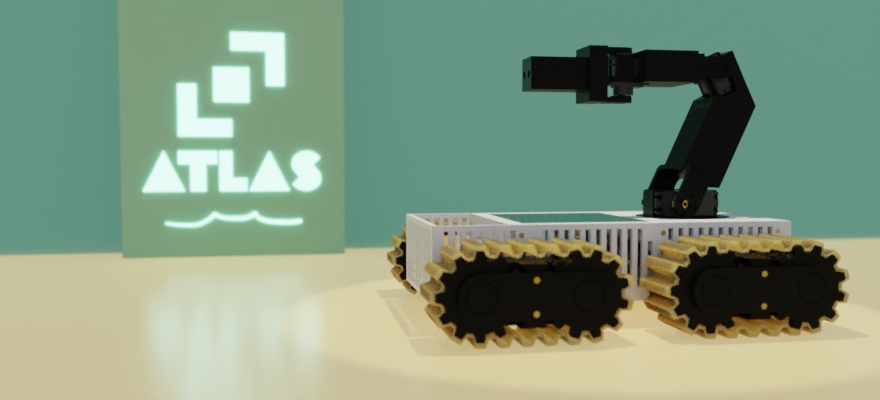
Ruedardo
Es un prototipo de robot dedicado a la EXPLORACIÓN AVANZADA. El robot está pensado para le exploración de lugares desconocidos donde es difícil acceder.
¿Qué hace?
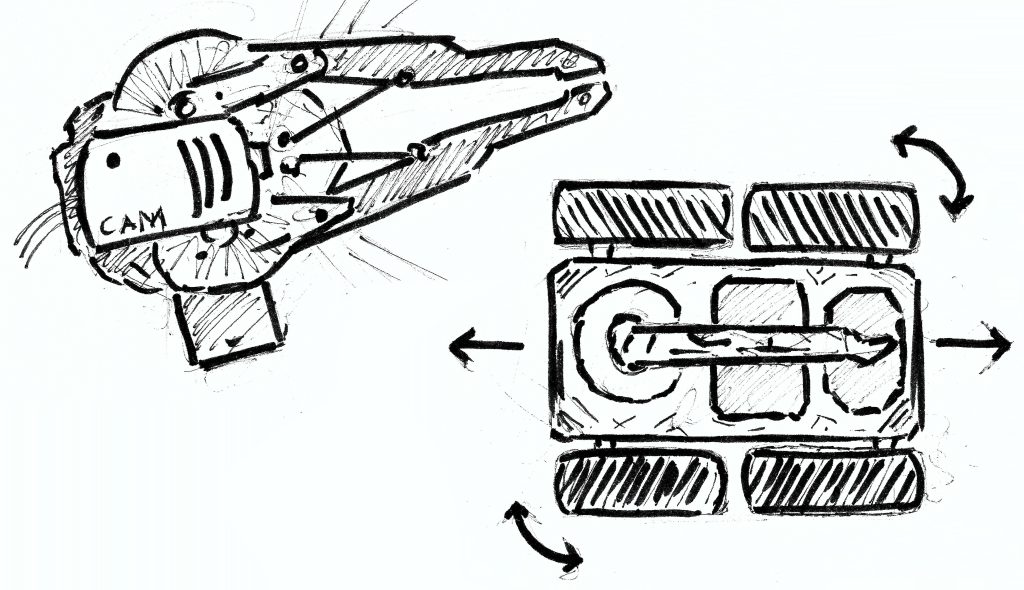
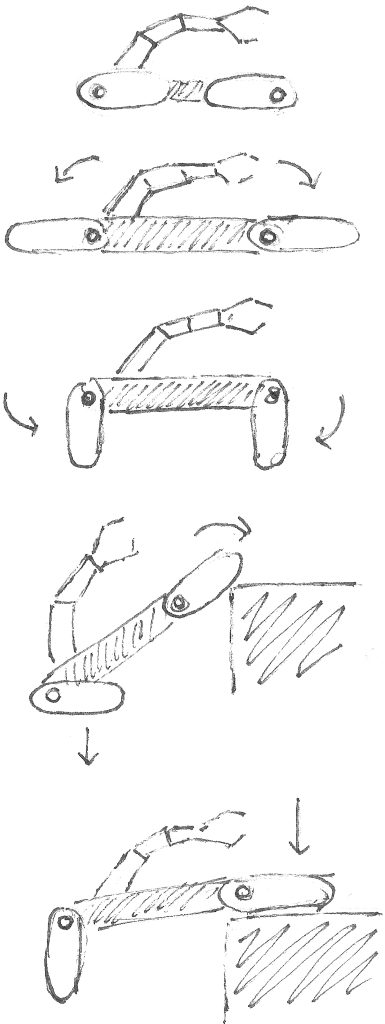
RUEDARDO cuenta con 4 motores independientes que le permiten trasladarse y rotar sobre su propio eje, consiguiendo así un MOVIMIENTO EN TODAS DIRECCIONES. Además, puede avanzar por terrenos irregulares rotando cada rueda/oruga un máximo de 180º.
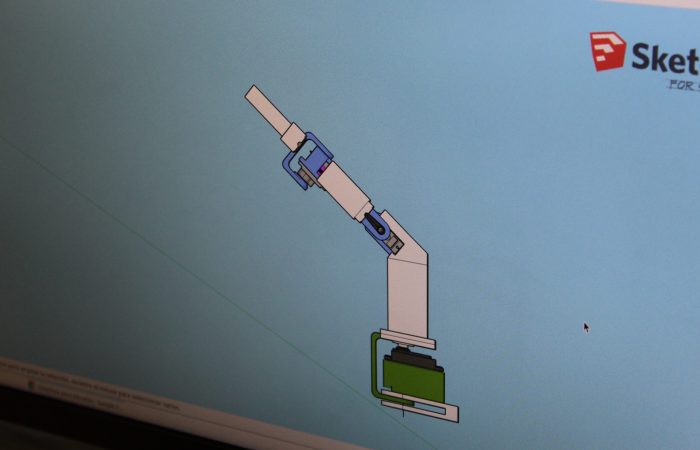
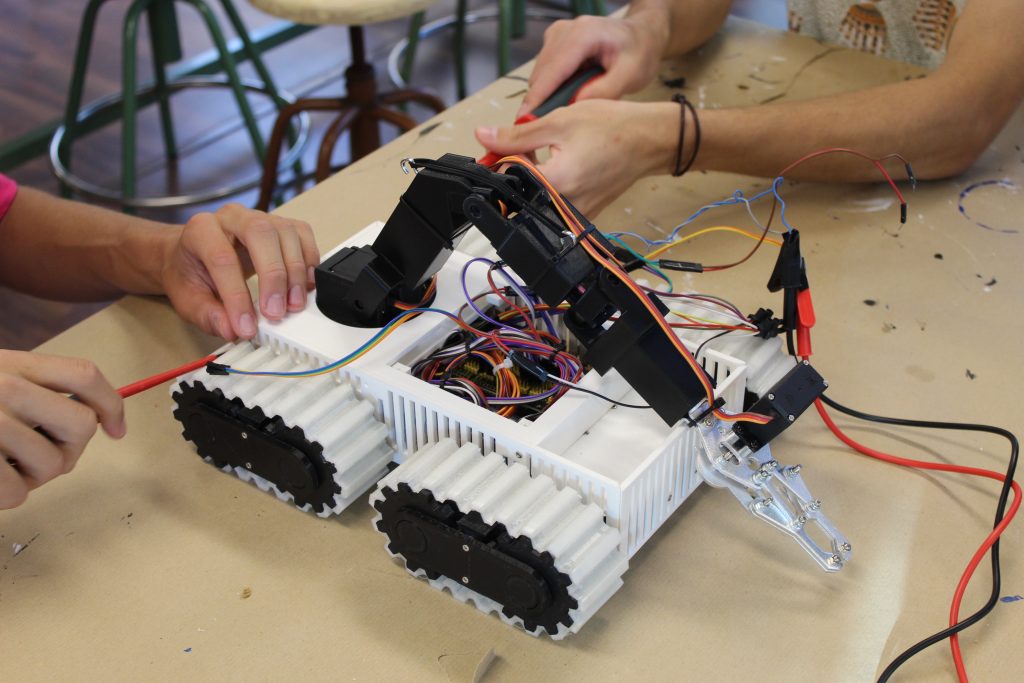
También puede recoger muestras del terreno con un BRAZO ROBÓTICO ARTICULADO, llegando así a todos los ángulos posibles.
Este prototipo incluye una CÁMARA colocada en el extremo del brazo robótico, con ella se puede obtener una VISIÓN CLARA Y LIMPIA del terreno inexplorado.
Tecnologías
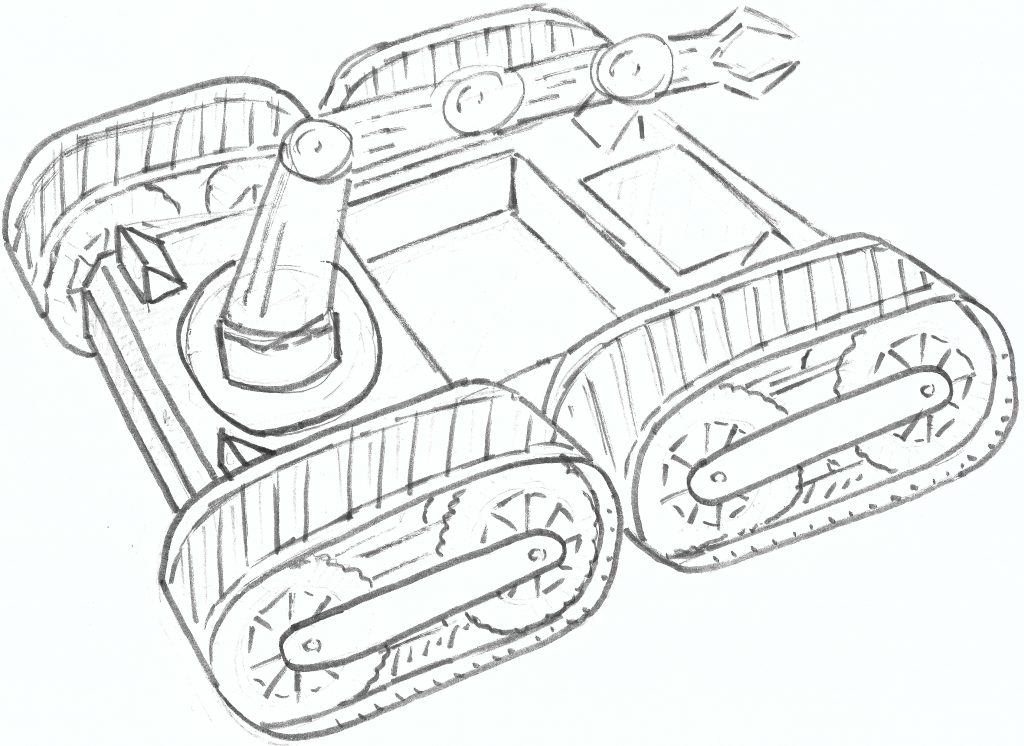
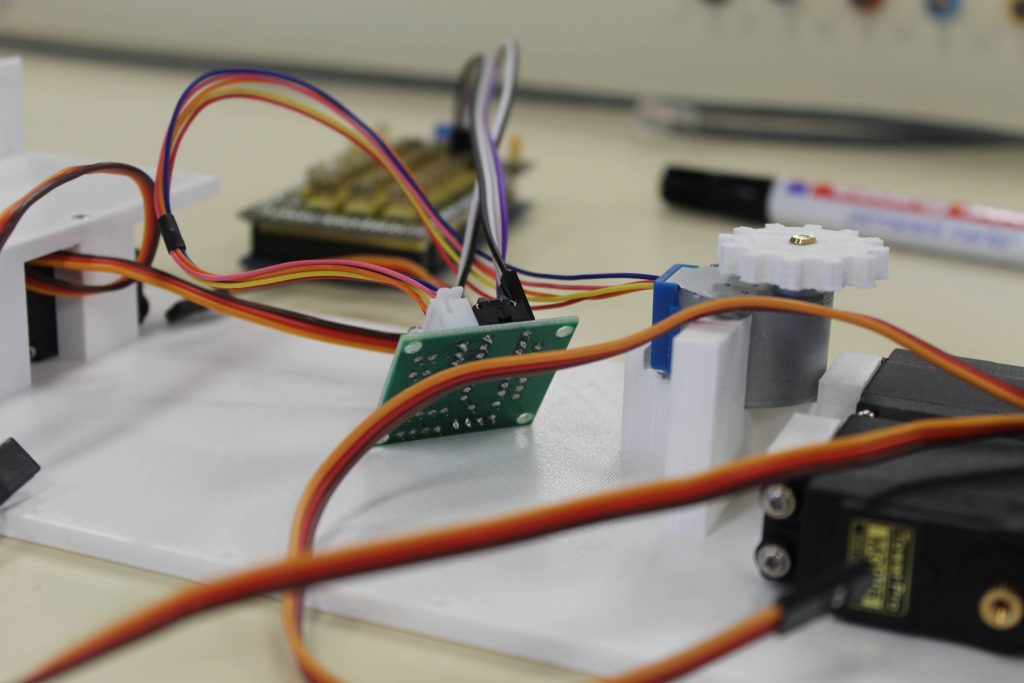
Para su desplazamiento, cuenta de un motor paso a paso en cada RUEDA/ORUGA, además estas están articuladas con servomotores con HASTA 10 kg de fuerza, con esto se consigue una de las funciones más características del robot, el avance por terreno irregular.
La base a donde van sujetas las ruedas/orugas tiene forma rectangular, asimismo se encuentra el brazo robótico articulado y en el interior de la base el microcontrolador, este se encarga de gestionar las entradas/salidas y las comunicaciones del dispositivo.
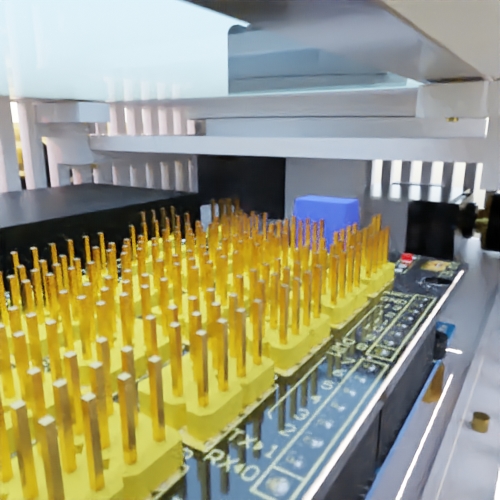
Fase 2. Diseño Electrónico
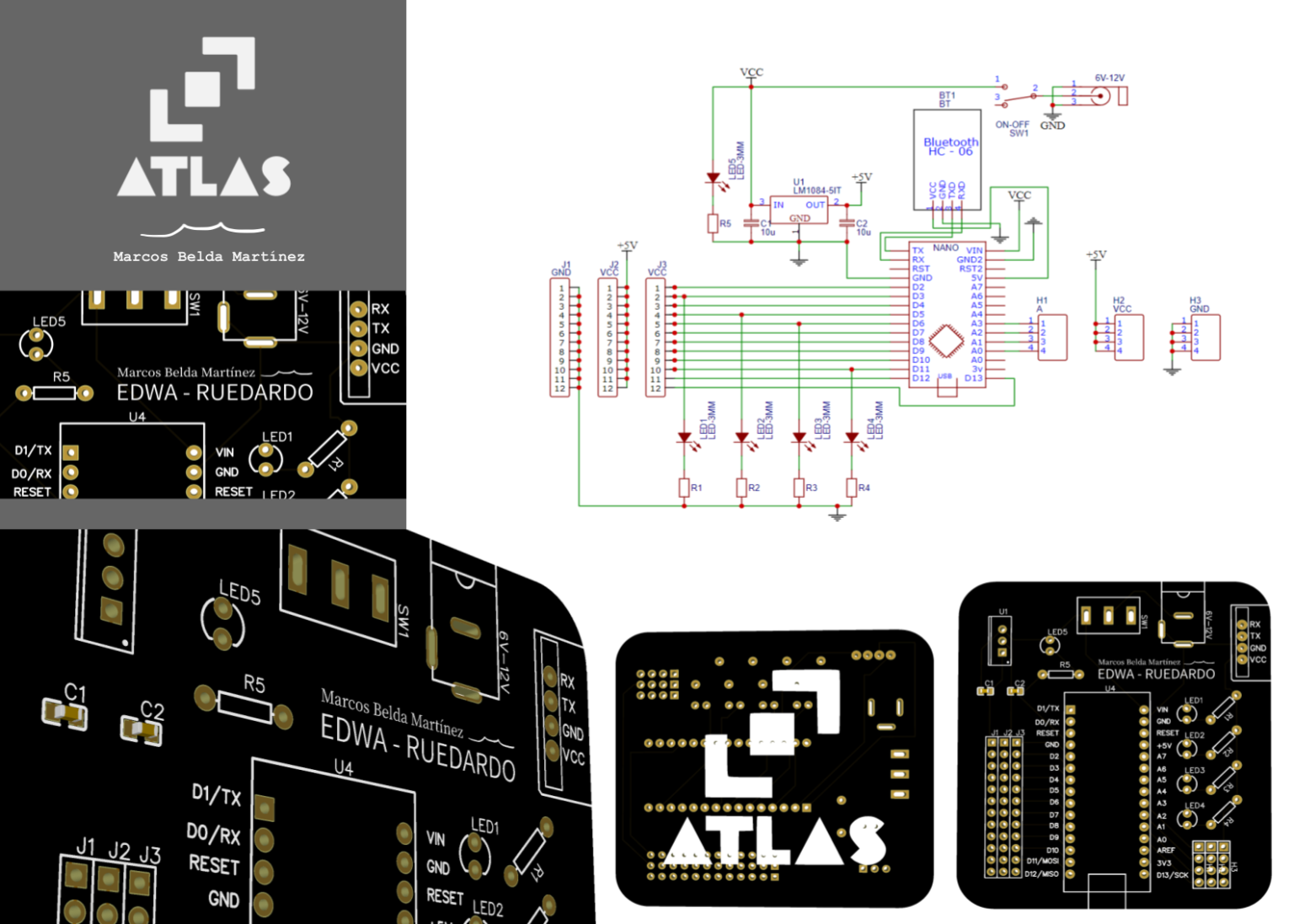
Durante esta fase del proyecto, a través de la aplicación EasyEDA, aprendimos a diseñar circuitos electrónicos y crear PCB o placas de circuito impreso a partir de ellos.
Es una metodología que el profesorado de nuestro instituto (IES La Patacona) llevaba ya años implementando.
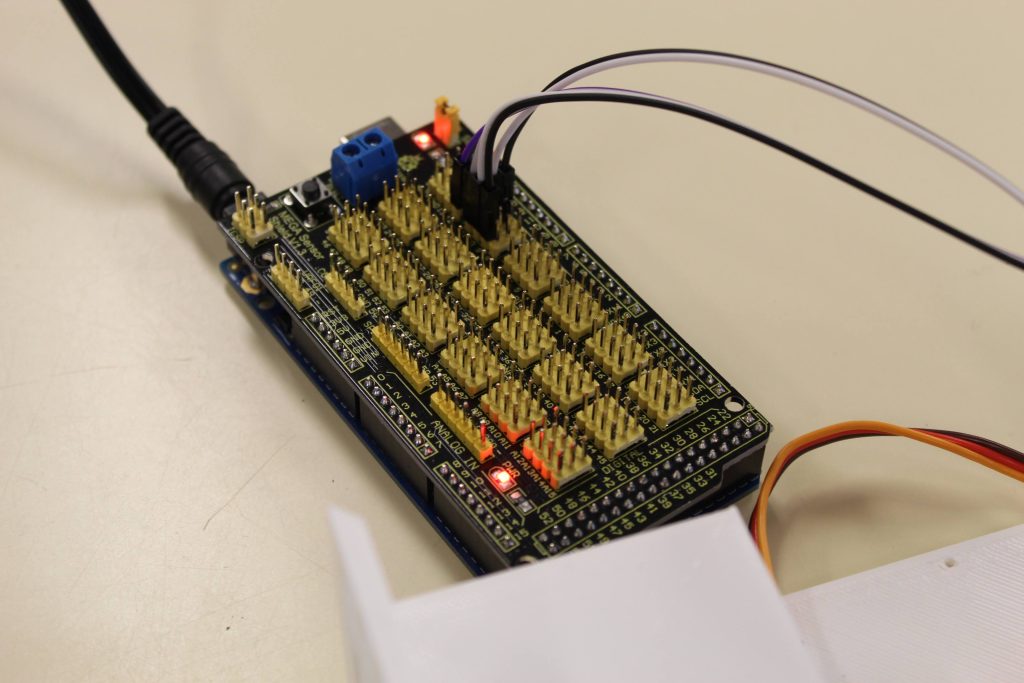
En un principio se planteó que el robot funcionara con un microcontrolador tipo Arduino Nano, pero finalmente se optó por usar una Arduino Mega con un escudo para conectar todos los actuadores necesarios. La razón de este cambio fue que la Arduino Mega proporcionaría una mayor cantidad de conexiones, y nos dimos cuenta de que con la Nano no sería suficiente para el proyecto.
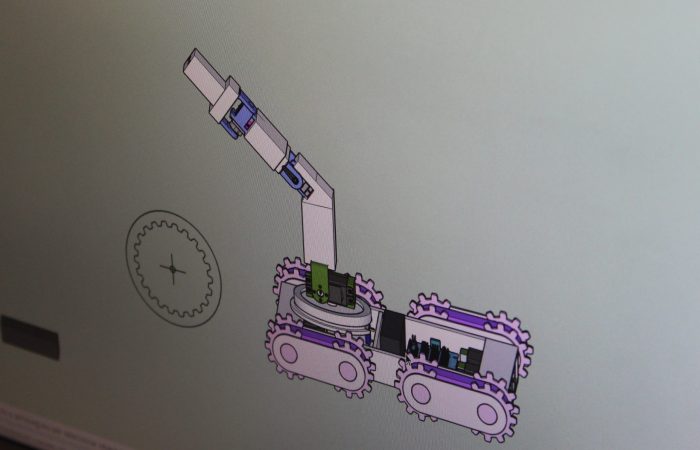
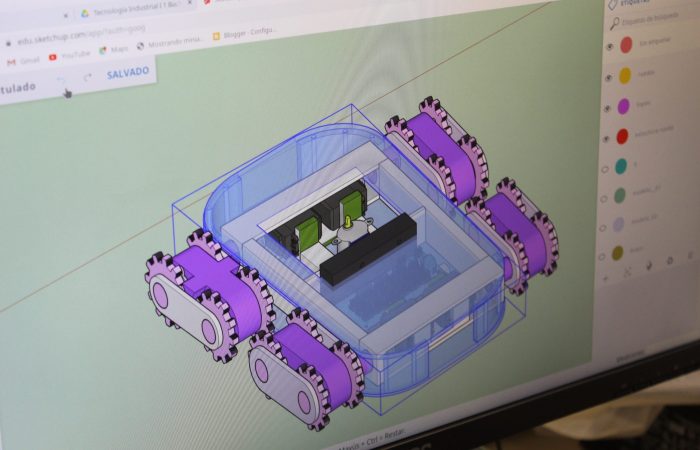
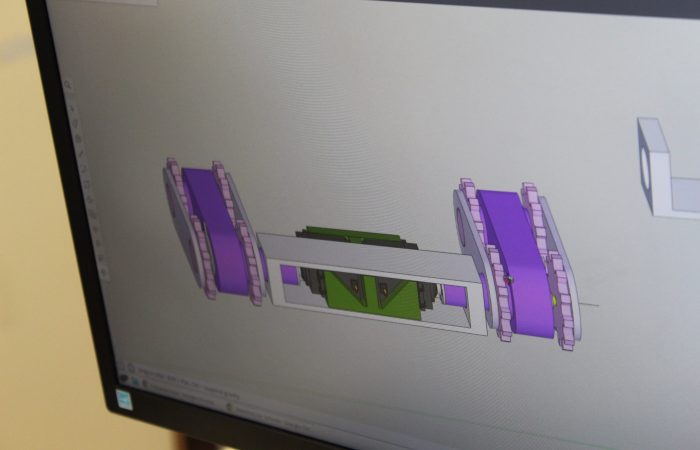
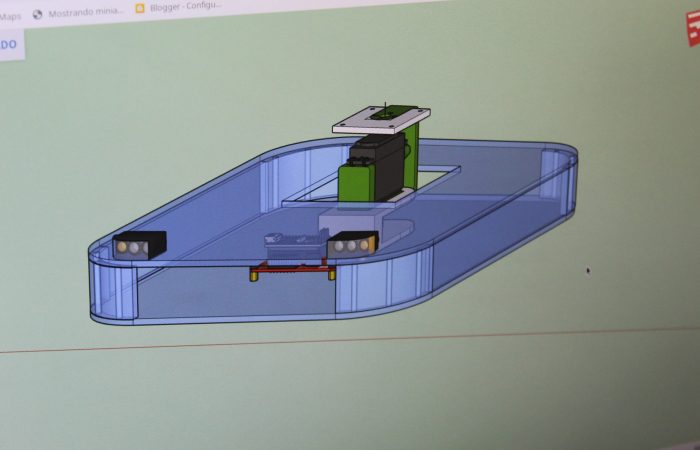
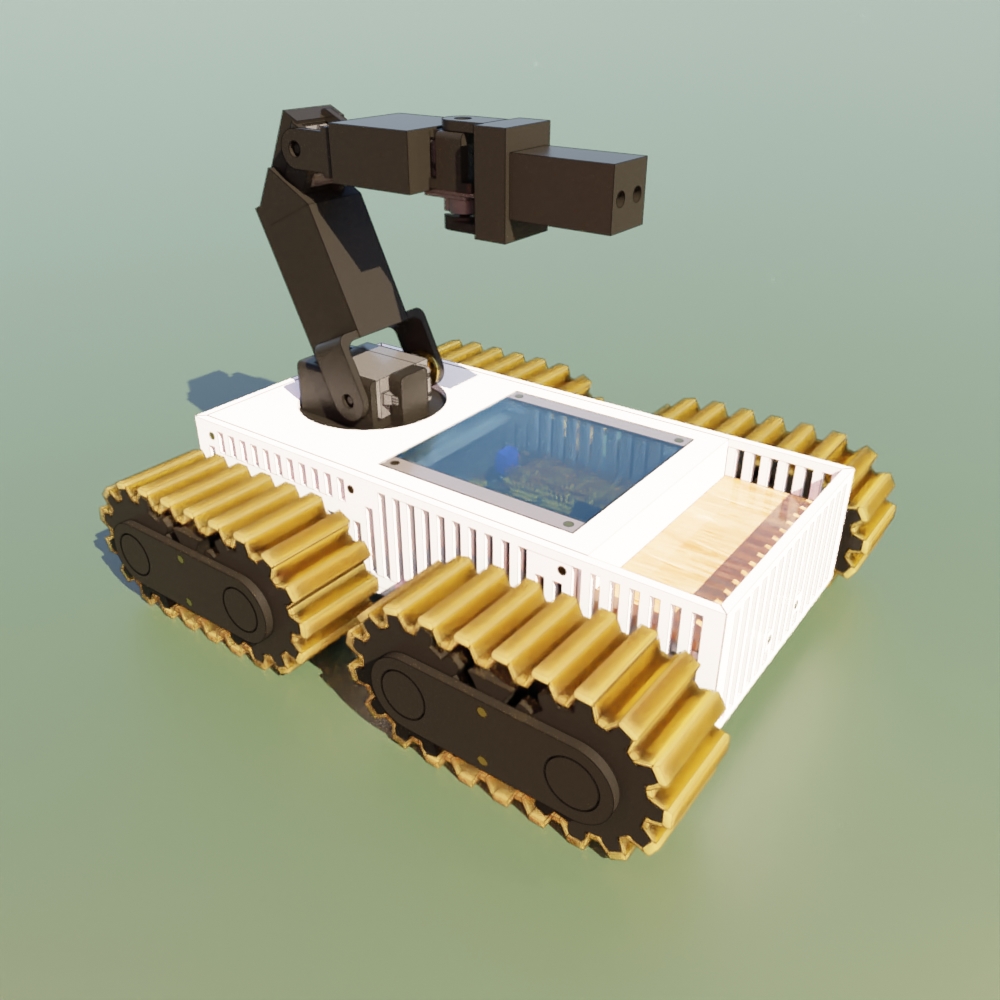
Fase 3. Diseño 3D
Toda la estructura ha sido diseñada desde cero con la aplicación SketchUp (en su día fue Google SketchUp for schools). Es una aplicación de diseño 3D que ya habíamos usado con anterioridad durante la secundaria.
Es bastante intuitiva y fácil de utilizar, dispone de una biblioteca con objetos donde se pueden encontrar los servomotores, motores paso a paso, microcontroladores, etc.
Esta fase del proyecto consistió en buscar una distribución óptima de todos los elementos del robot móvil.
Fase 4. Simulación
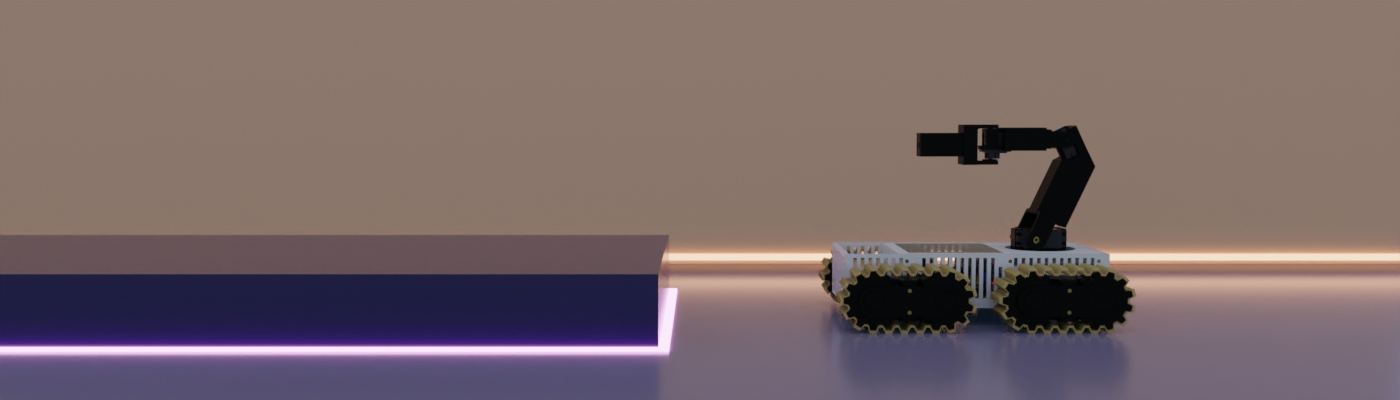
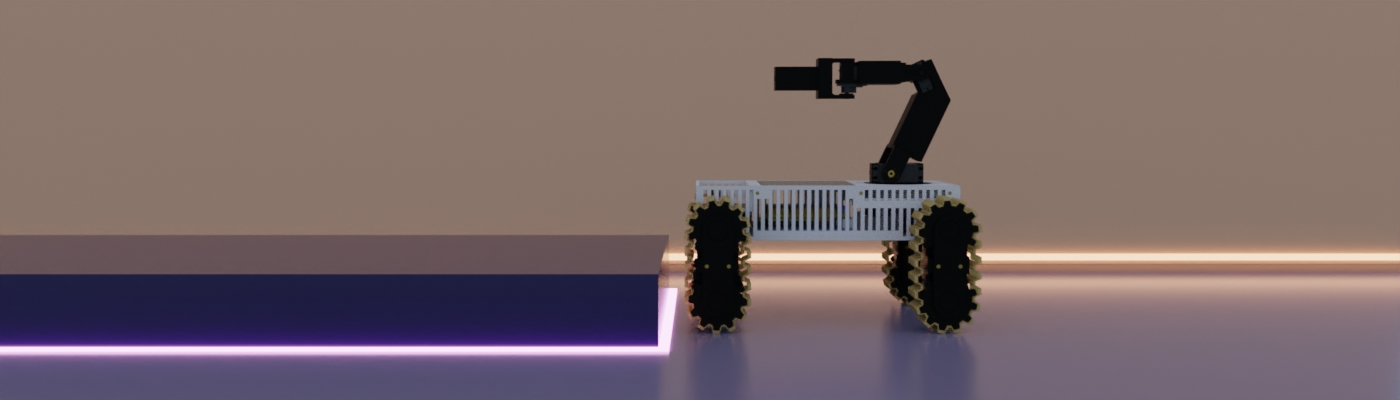
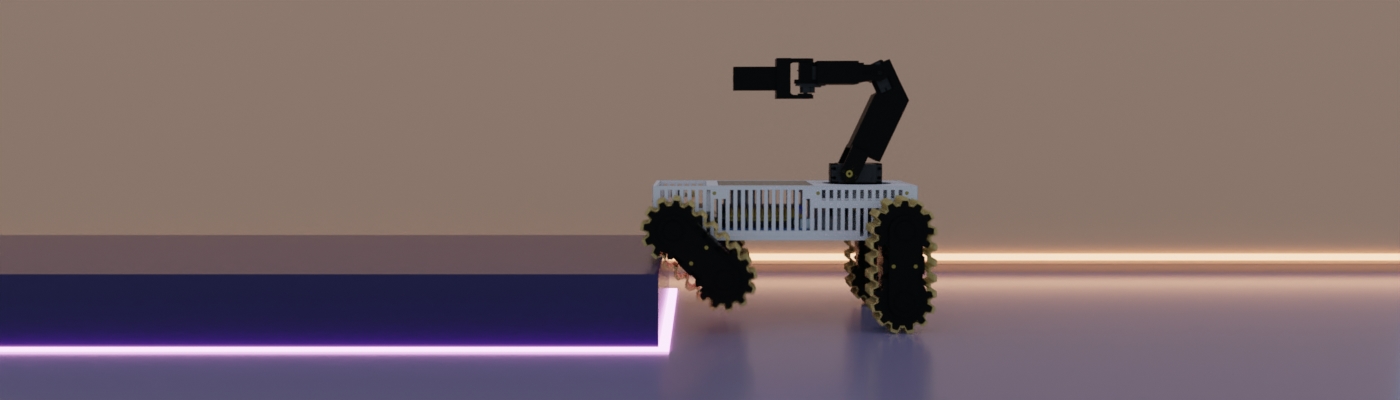
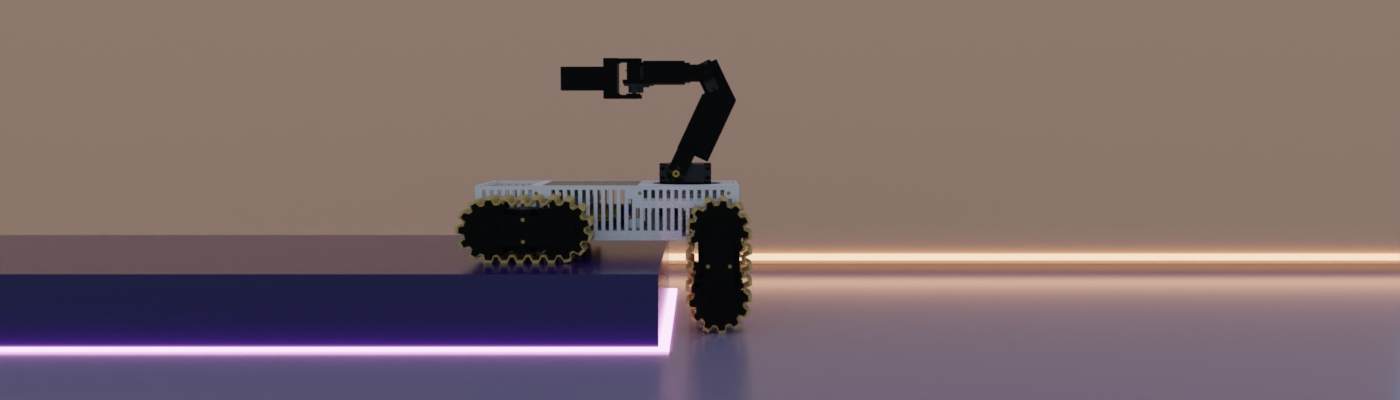
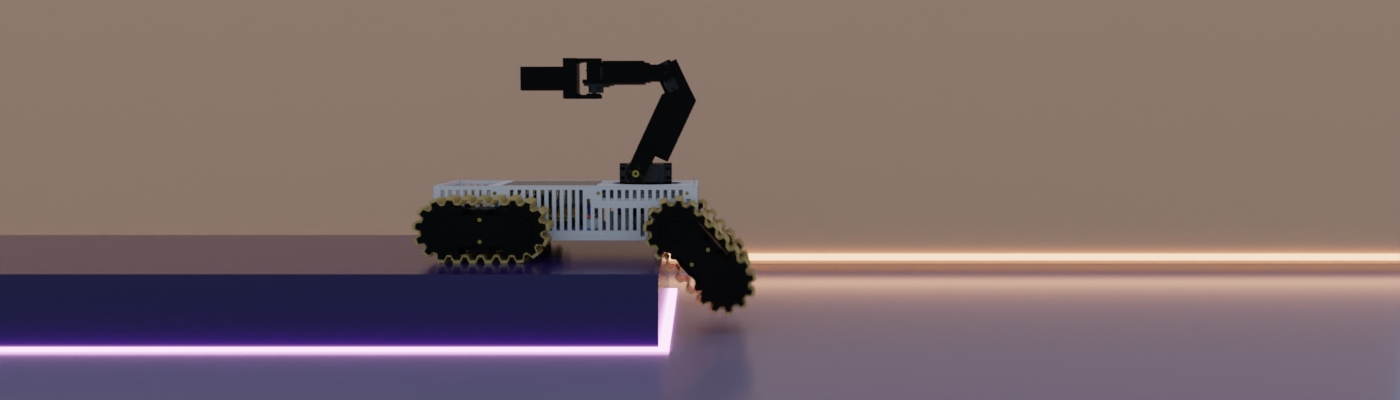
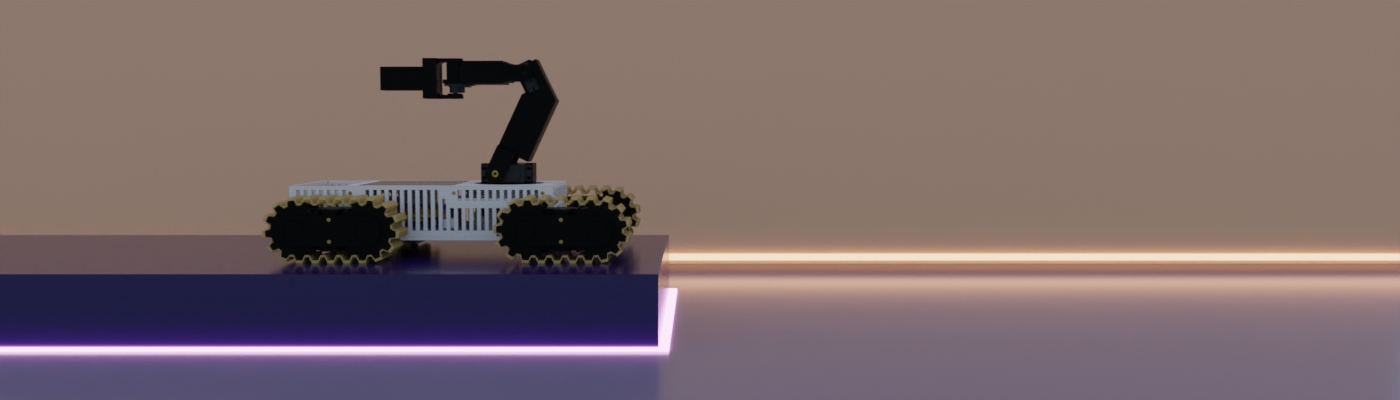
Cálculo de movimientos
La fase de simulación nos sirvió para diseñar los diferentes movimientos del robot, que más tarde, nos servirían para calibrar los servomotores durante la fase de programación.
Para llevar a cabo esta tarea, lo hicimos a gracias a la aplicación Blender. En proyectos anteriores aprendimos a renderizar imágenes con este software, pero para el proyecto se nos pidió realizar algún tipo de animación del resultado esperado.
Fase 5. Impresión 3D y Montaje
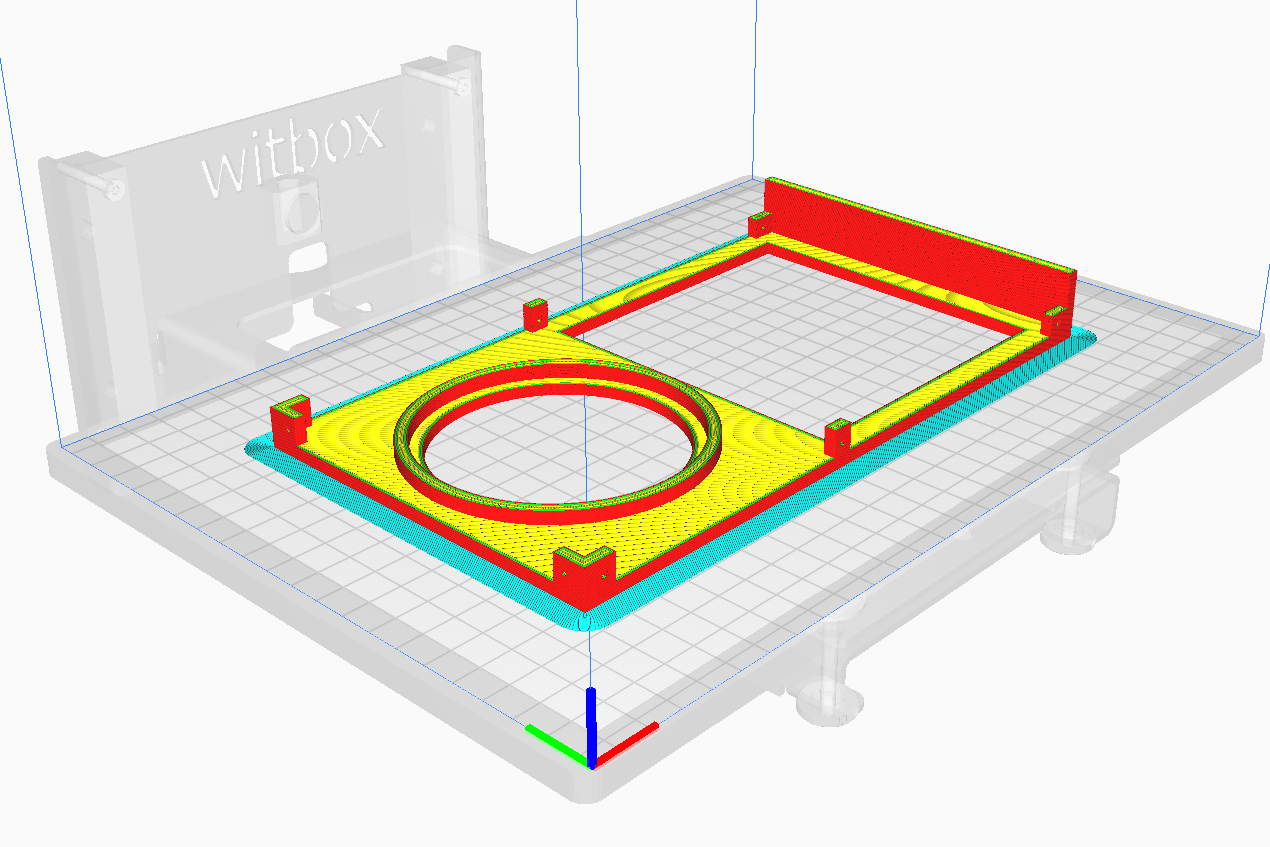

Impresión 3D con Cura
Tras la fase de diseño, el siguiente paso fue construir el prototipo. Para ello utilizamos la impresora 3D del aula de tecnología. Primero de todo, tuvimos que crear los archivos de impresión a partir de los modelos 3D de SketchUp, para generarlos usamos UltiMaker Cura.
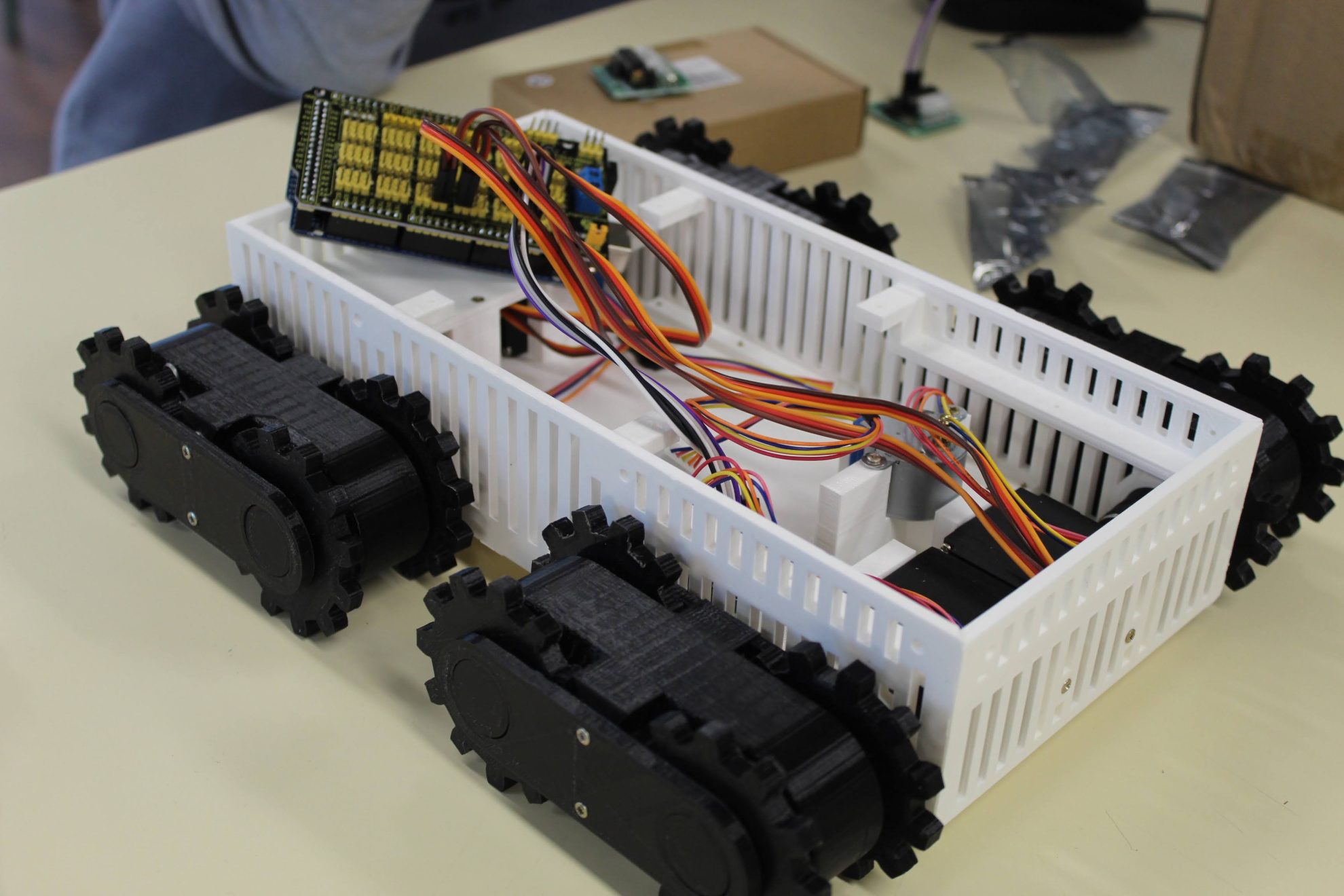
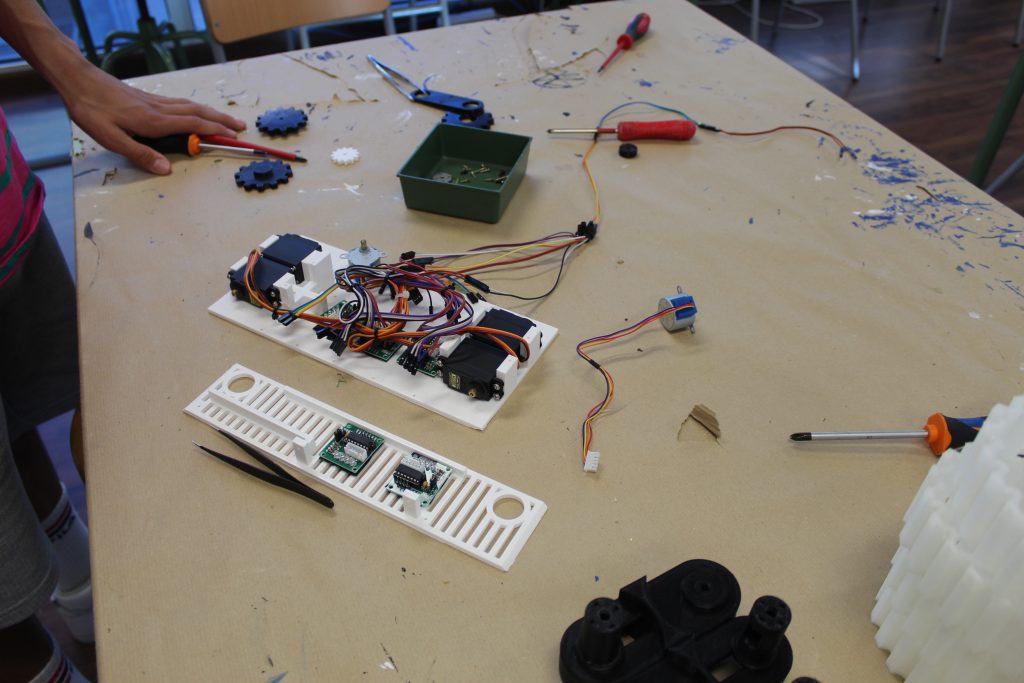
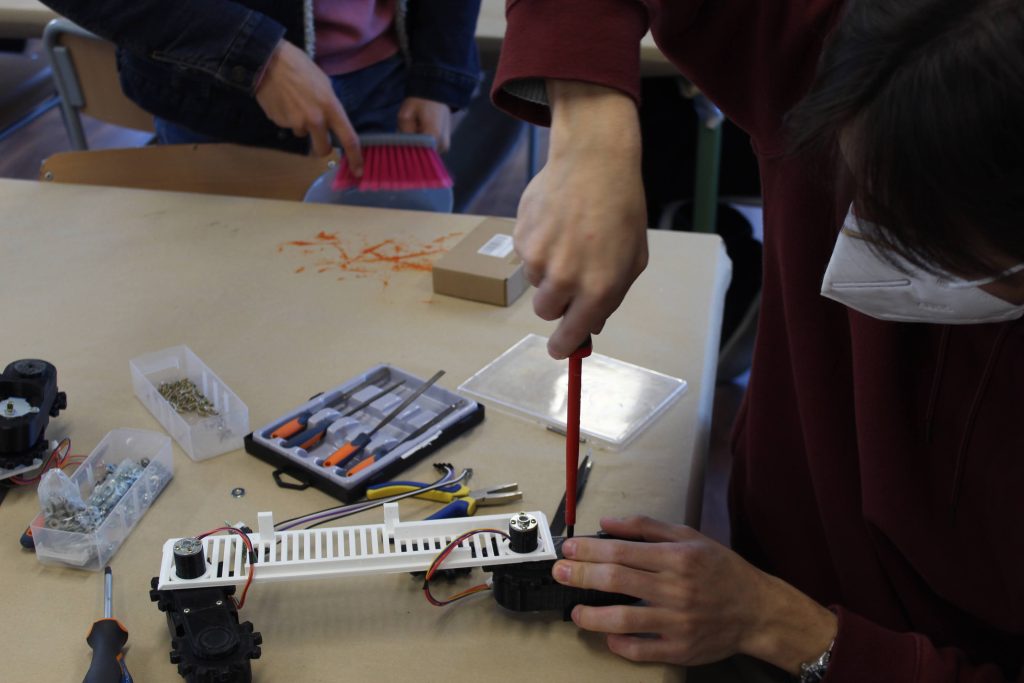
Montaje del Prototipo
Ensamblamos todas las piezas y fuimos montando la electrónica al mismo tiempo. A medida que se iban colocando los componentes se comprobaba su correcto funcionamiento.
Fase 6. Programación
Trabajando con Arduino
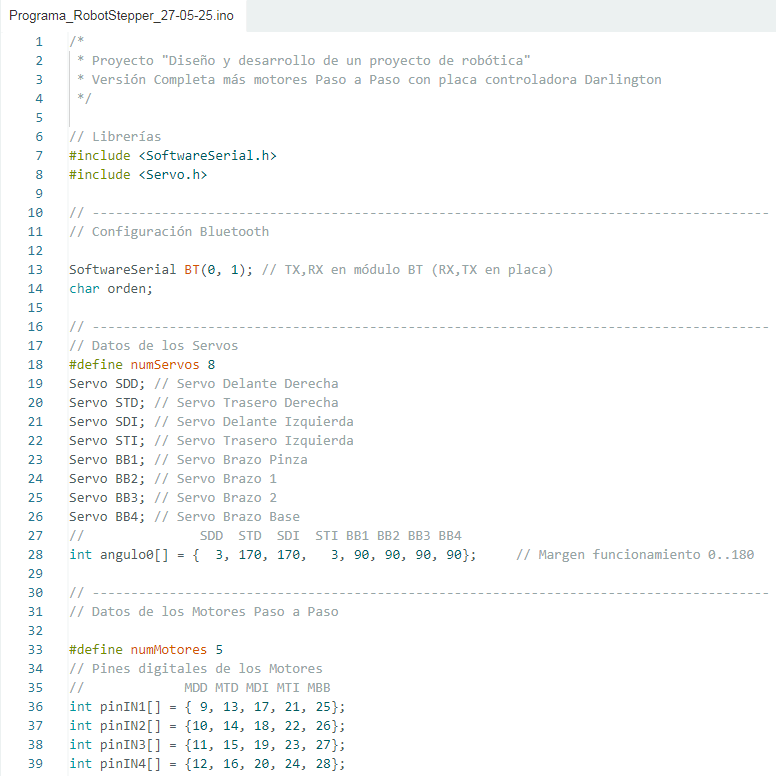
Años anteriores ya habíamos trabajado con Arduino, pero hasta ahora se habían tratado de proyectos sencillos. Este año aprendimos a usar correctamente las librerías de Arduino y a cómo configurar una placa correctamente.
Programas del Robot
En el código se crean programas secuenciales para realizar los movimientos deseados, como por ejemplo avanzar, retroceder, rotar izquierda, rotar derecha, subir un obstáculo, etc.
Cada uno de los programas tiene asignada una variable tipo char (alfanumérico). Cuando el robot recibe una orden (variable char), se realiza un sencillo switch/case y el robot realiza la acción asignada a la variable.
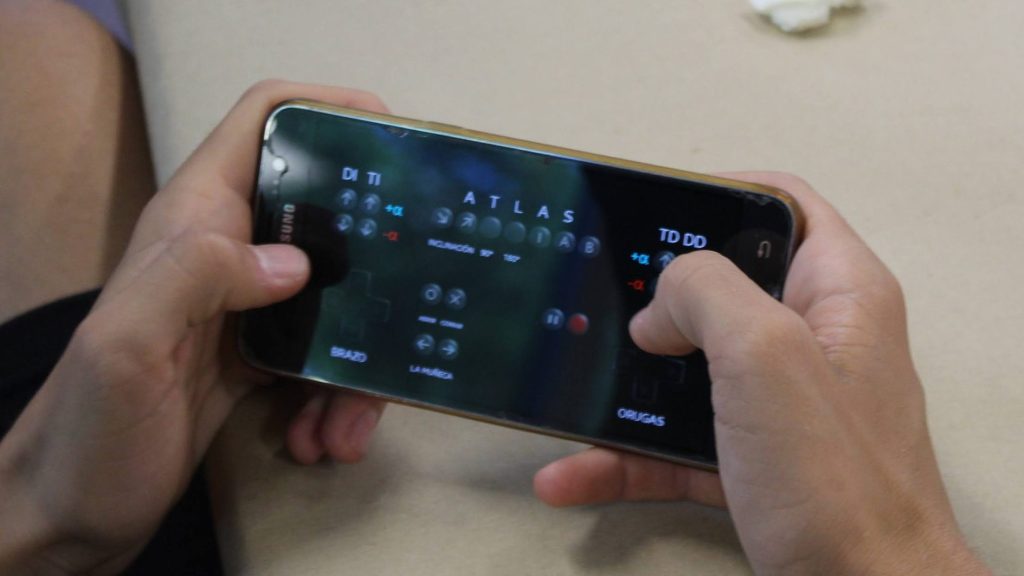
Comunicación Bluetooth
Mediante un módulo Bluetooth nos comunicamos con el robot y con una aplicación móvil diseñamos un menú con botones. Cada botón está asignado a una variable de tipo char, y al presionar el botón, se transmite la variable correspondiente al robot mediante Bluetooth.
Dentro del programa se realiza un bucle que atiende a los mensajes que llegan por Bluetooth.
Fase 7. Resultado Final
Habilidades aprendidas


Conclusiones y trabajo a futuro
El proyecto del Robot de Exploración nos ha permitido aplicar y expandir nuestros conocimientos en diversas áreas como la electrónica, el diseño 3D, la programación y la robótica. A lo largo de las diferentes fases, hemos aprendido a trabajar en equipo, resolver problemas complejos y adaptarnos a nuevas herramientas y tecnologías.
Este proyecto no solo nos ha preparado para futuros desafíos académicos y profesionales, sino que también ha despertado en nosotros una pasión por la exploración, la tecnología y en concreto la robótica. En mi caso, esto fue lo que me motivó a estudiar el grado de Informática Industrial y Robótica en la UPV.
Agradecimientos
Este proyecto no hubiese sido posible sin la ayuda de nuestros profesores de tecnología, Jordi López Lluch y Elena Gil, además de mis compañeros de equipo Ariel Baltanás y Álvaro Cortés.
Trabajo a futuro
- Mejoras en el diseño: Optimizar la estructura del robot para hacerlo más ligero y resistente.
- Sensores avanzados: Integrar sensores adicionales para mejorar la capacidad de exploración y recolección de datos.
- Autonomía: Desarrollar algoritmos que permitan al robot tomar decisiones autónomas en entornos desconocidos.
- Pruebas en entornos reales: Realizar pruebas en condiciones que simulen las cuevas de la Luna y Marte para evaluar el rendimiento del robot.